Componentes de manos de robot | EOAT
Maqmetal Automation ofrece el Servicio de estudio, diseño y fabricación de manos de Robot según las necesidades del cliente o proyecto.
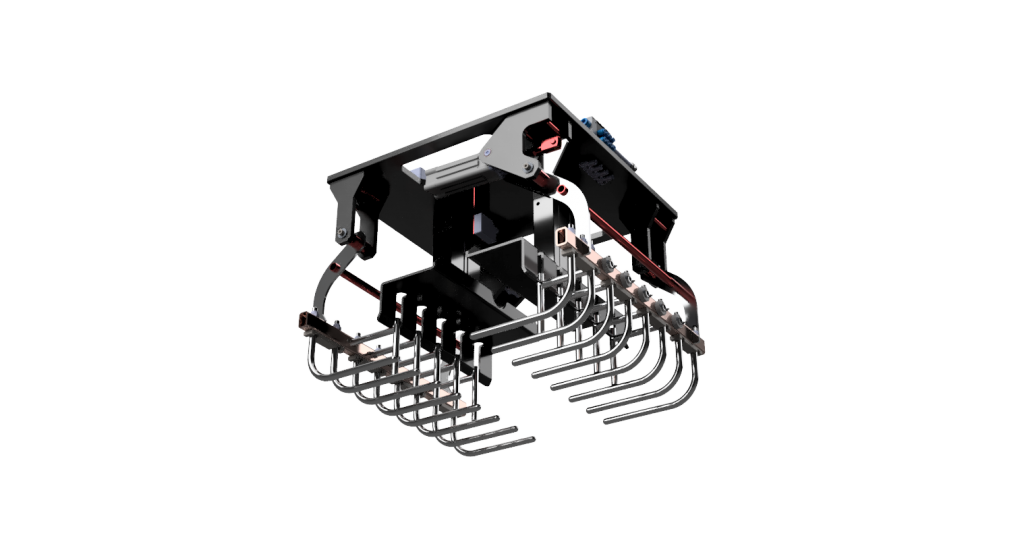
Construimos manos de robot según las especificaciones del proyecto a realizar, ensambladas con elementos de mercado de nuestro partner AGS, con stock y entrega inmediata, o con propios elementos mecanizados específicos para las necesidades del trabajo a realizar.
Construimos manos de todo tipo de complejidad, desde la extracción de piezas con ventosas y pinzas, hasta la realización de insertos, clipaje o verificación por visión o peso de los elementos a tratar.
También ofrecemos estaciones de corte de colada o de mecanización de piezas, con la posibilidad de trabajo en continuo o independientes al proceso de máquina.
Disponemos de Servicio de impresión 3D para ejecutar construcciones de grippers especiales, elementos para las manos de Robot que no están en el mercado o prototipos de los modelos a trabajar y estudiar.
Con AGS Automation ( link ), nuestro partner aleman, nos dedicamos al desarrollo de componentes y sistemas innovadores para manos de robot y automatizaciones. Toda la cadena de valor añadido se encuentra en nuestra empresa lo cual facilita flexibilidad y seguridad para nuestros clientes
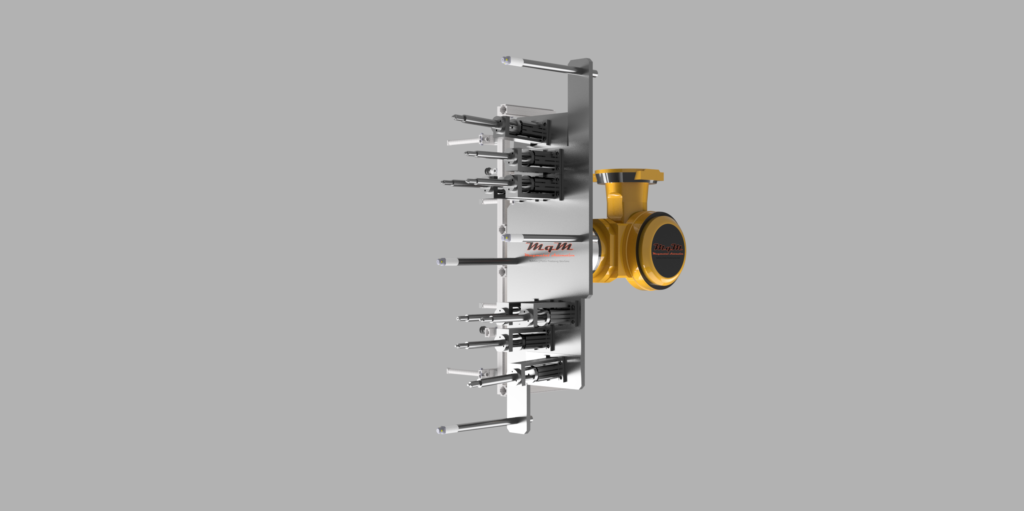
El sistema PreciGrip
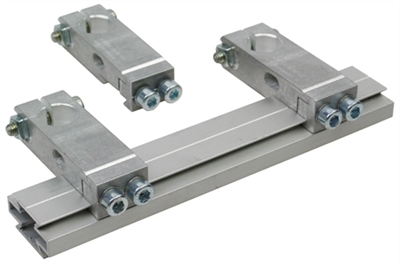
La unidad modular PreciGrip fue desarrollada a partir de una experiencia de años en el montaje de componente por manos de robot. El objetivo aquí es montar los componentes de la mano de robot en una orientación a 90 grados y hacer ajustable sólo el elemento operativo como puede ser el apoyo de pinza, la abrazadera o soporte de ventosa, las pinzas o los dedos de cogida. Para ello, todos los componentes de la unidad modular Standard son compatibles.
Una de las ventajas destacadas ante el sistema tradicional es la posible incorporación de nuevos elementos sin la necesidad de desmontar otros.
El Perfil tiene una resistencia superior gracias a su geometría y refuerza las posibles alteraciones del marco de las manos de robot en caso de impacto involuntario.
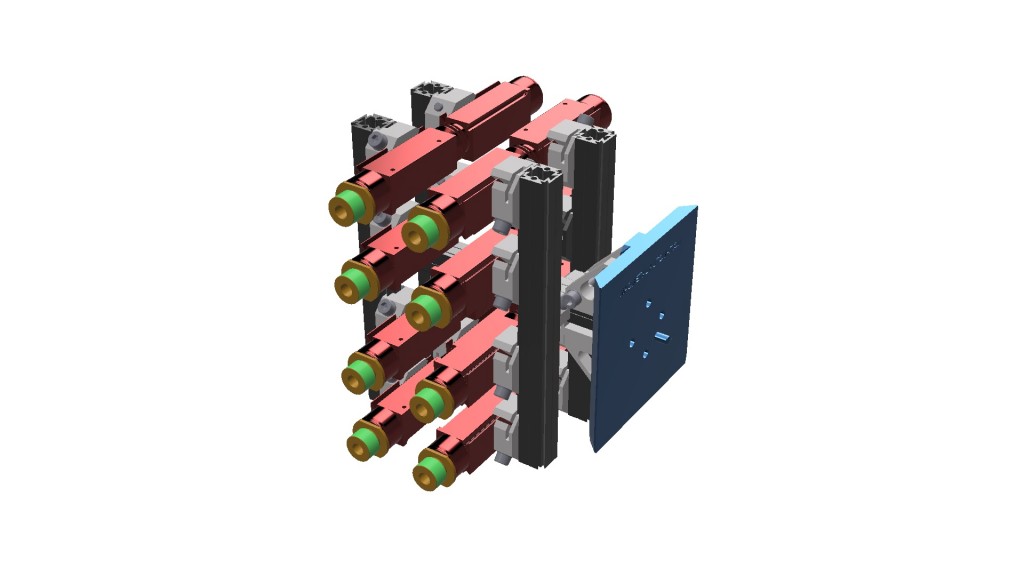
Sistema de cambio rápido y automático
Los sistemas de cambio rápido para las manos de robot permiten estandarizar las conexiones de vacío y eléctricas permiten al operario a realizar el cambio de mano sin dificultades y a prueba de errores.
Todos los sistemas pueden ser compatibles entre el PreciGrip y el sistema standard de perfilería, para ejecutar el cambio de mano automáticamente.